Ritorno alla posizione iniziale (rth) – DJI Mavic Pro Manuale d'uso
Pagina 13
Velivolo
Manuale utente
di Mavic Pro
©
2017 DJI Tutti i diritti riservati.
13
Ritorno alla posizione iniziale (RTH)
La funzione di ritorno alla posizione iniziale (RTH) riporta il velivolo nell'ultimo punto registrato come
posizione iniziale. Esistono tre tipi di procedure RTH: Smart RTH, Low Battery RTH e Failsafe RTH.
Questa sezione descrive in dettaglio i tre casi.
GPS
Descrizione
Posizione
iniziale
Se prima del decollo il segnale GPS è forte, la posizione iniziale
corrisponde al punto da cui è stato lanciato il velivolo. L'intensità
del segnale GPS è indicata dall'icona GPS (
). L'indicatore
di stato del velivolo lampeggia rapidamente quando viene
registrata la posizione iniziale.
Il velivolo non può tornare alla posizione iniziale quando il segnale GPS è debole ( [
]
visualizzato in grigio) o non è disponibile.
Il velivolo non è in grado di evitare gli ostacoli durante la funzione RTH Failsafe se il
sistema di visione in avanti è disattivato. Prima di ogni volo è importante impostare
un'altitudine Failsafe idonea. Lanciare l'app DJI GO 4, accedere a "Camera" e toccare
per impostare l'altitudine Failsafe.
L'utente non può controllare il velivolo mentre sta salendo alla sua altitudine Failsafe.
Tuttavia, l'utente può premere il pulsante RTH per interrompere la salita e riprendere il
controllo.
Il velivolo può rilevare ed evitare gli ostacoli quando il sistema di visione in avanti è attivo
e c'è abbastanza luce. Il velivolo sale automaticamente per evitare l'ostacolo e volare fino
alla posizione iniziale alla nuova altitudine. Per assicurarsi che torni alla posizione iniziale
con la parte anteriore rivolta in avanti, il velivolo non può ruotare o volare a sinistra né a
destra durante la procedura RTH mentre il sistema di visione in avanti è attivato.
Il sistema di visione in avanti può essere attivato solo durante il volo o durante la funzione RTH.
Failsafe RTH
Se la posizione iniziale è stata registrata correttamente e la bussola funziona normalmente, la funzione
Failsafe RTH si attiva automaticamente se il segnale del dispositivo di controllo remoto viene perso
per un periodo di tempo specifico (3 secondi quando si utilizza il dispositivo di controllo remoto e
20 secondi quando si utilizza il Wi-Fi). La funzione di ritorno alla posizione iniziale (Return-to-Home)
può essere annullata dal pilota, consentendo di riacquisire il controllo quando viene ristabilito il
collegamento del segnale del dispositivo di controllo remoto.
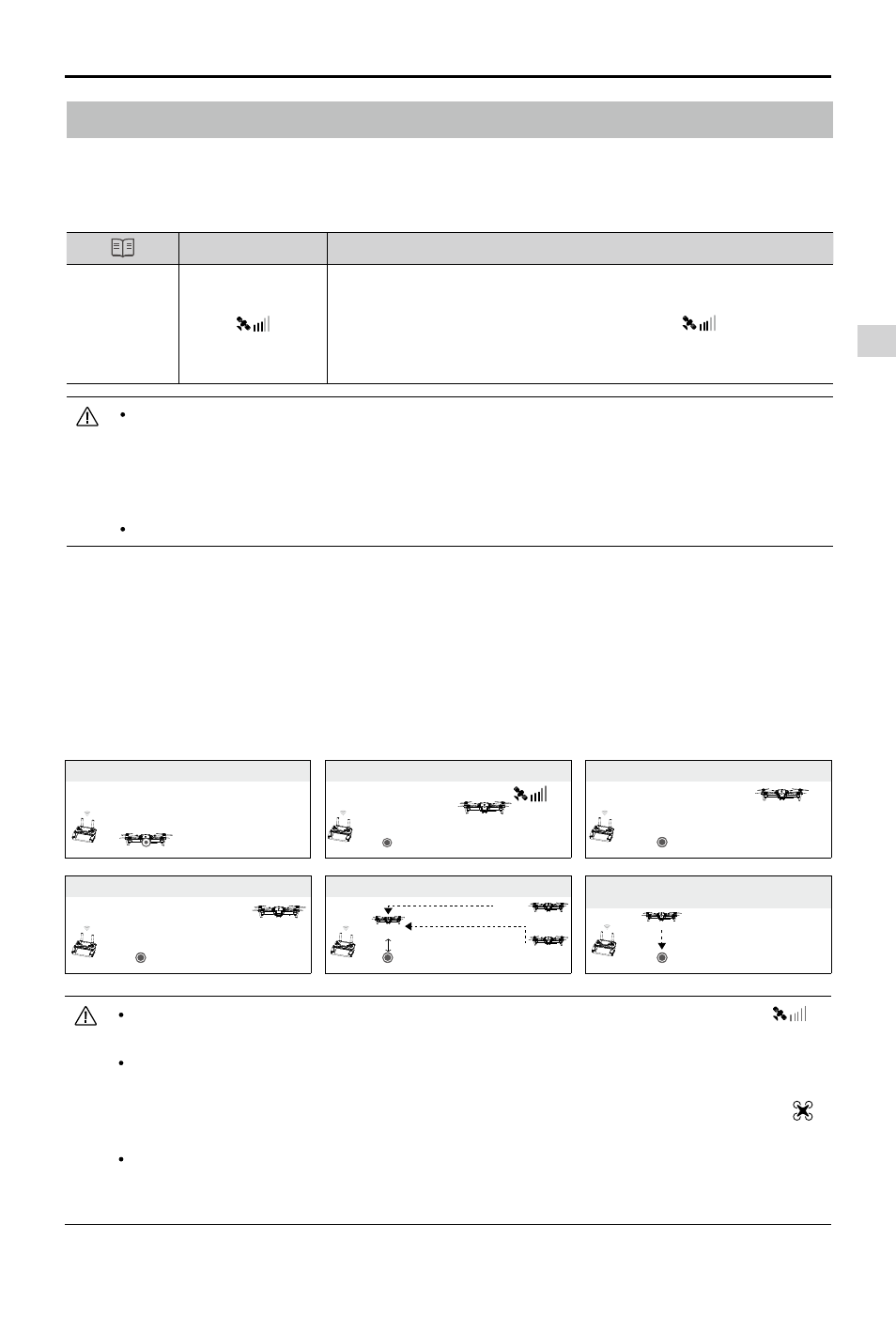
1 Registrazione della posizione iniziale
3 Perdita del segnale dispositivo di controllo remoto
2 Conferma della posizione iniziale
6 Atterraggio (dopo che l'utente ha confermato
l'atterraggio)
4 Perdita del segnale per un periodo prolungato
×
×
5 RTH (regolabile in altezza)
Altezza rispetto al punto iniziale (HP)<=Altitudine Failsafe
Altezza rispetto al punto iniziale (HP)>Altitudine Failsafe
Alzarsi all'altitudine Failsafe
Altitudine Failsafe
×
×
Volo in sospensione a 2 metri sopra
la posizione iniziale